
Publications
 A Divide-and-Merge Point Cloud Clustering Algorithm for LiDAR Panoptic Segmentation
A Divide-and-Merge Point Cloud Clustering Algorithm for LiDAR Panoptic Segmentation
Yiming Zhao, Xiao Zhang, and Xinming Huang.
ICRA 2022.
[Paper] [Code]
 A Technical Survey and Evaluation of Traditional Point Cloud Clustering Methods for LiDAR Panoptic Segmentation
A Technical Survey and Evaluation of Traditional Point Cloud Clustering Methods for LiDAR Panoptic Segmentation
Yiming Zhao, Xiao Zhang, and Xinming Huang.
ICCV 2021.
Workshop on Traditional Computer Vision in the Age of Deep Learning
[Paper] [Code]
 FIDNet: LiDAR Point Cloud Semantic Segmentation with Fully Interpolation Decoding
FIDNet: LiDAR Point Cloud Semantic Segmentation with Fully Interpolation Decoding
Yiming Zhao, Lin Bai, and Xinming Huang.
IROS 2021.
[Paper] [Code]
 Distance Transform Pooling Neural Network for LiDAR Depth Completion
Distance Transform Pooling Neural Network for LiDAR Depth Completion
Yiming Zhao, Mahdi Elhousni, Ziming Zhang, and Xinming Huang.
IEEE Transactions on Neural Networks and Learning Systems. .
 Deep Lucas-Kanade Homography for Multimodal Image Alignment
Deep Lucas-Kanade Homography for Multimodal Image Alignment
Yiming Zhao, Xinming Huang, and Ziming Zhang.
CVPR 2021.
[Paper] [Code]
 A Surface Geometry Model for LiDAR Depth Completion
A Surface Geometry Model for LiDAR Depth Completion
Yiming Zhao, Lin Bai, Ziming Zhang, and Xinming Huang.
IEEE Robotics and Automation Letters 2021.
[Paper] [Code]
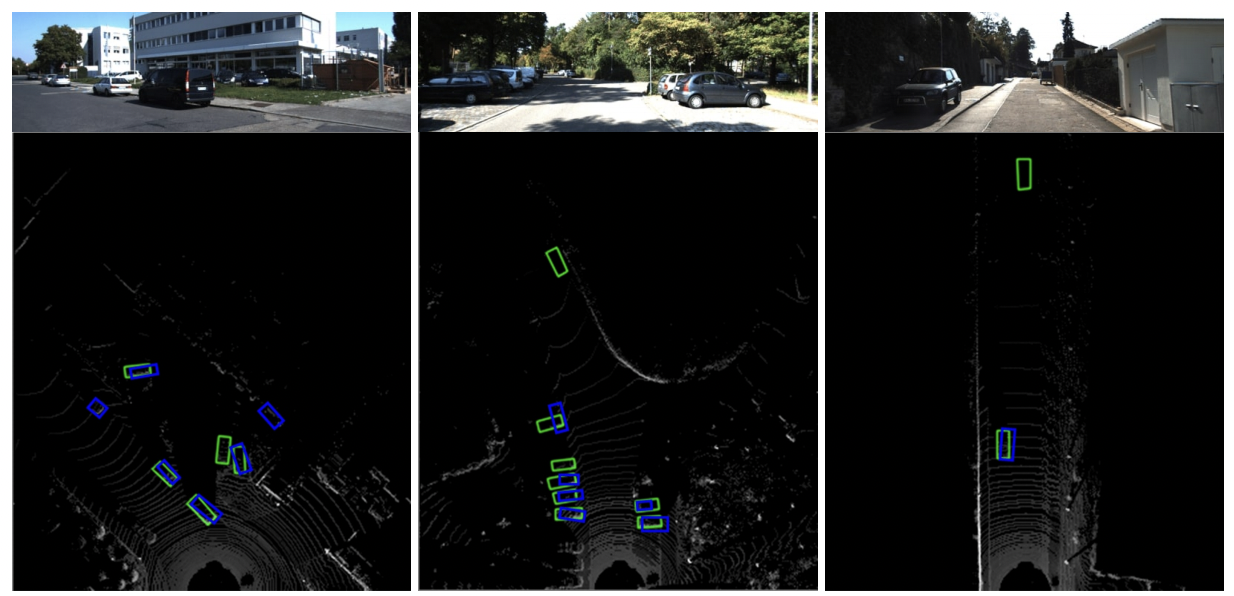 3D Vehicle Detection Using Camera and Low-Resolution LiDAR</a>
3D Vehicle Detection Using Camera and Low-Resolution LiDAR</a>
Lin Bai, Yiming Zhao, and Xinming Huang.
arxiv. 2020.
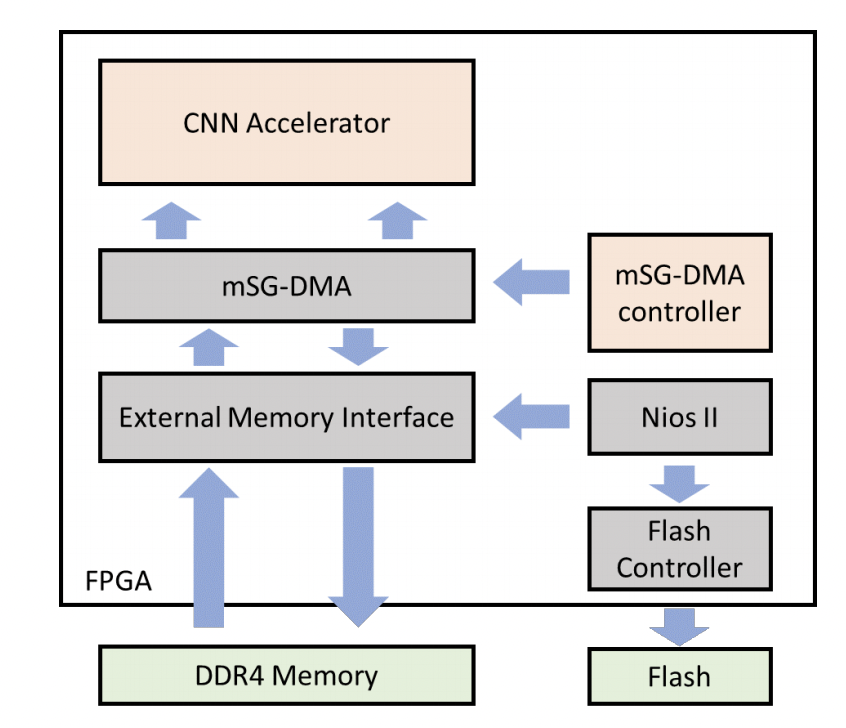 A CNN accelerator on FPGA using depthwise separable convolution</a>
A CNN accelerator on FPGA using depthwise separable convolution</a>
Lin Bai, Yiming Zhao, and Xinming Huang.
IEEE Transactions on Circuits and Systems II. 2018.
 Camera-based Blind Spot Detection</a>
Camera-based Blind Spot Detection</a>
Yiming Zhao, Lin Bai, Yecheng Lyu, and Xinming Huang.
Electronics. 2018.
[Paper] [Code]
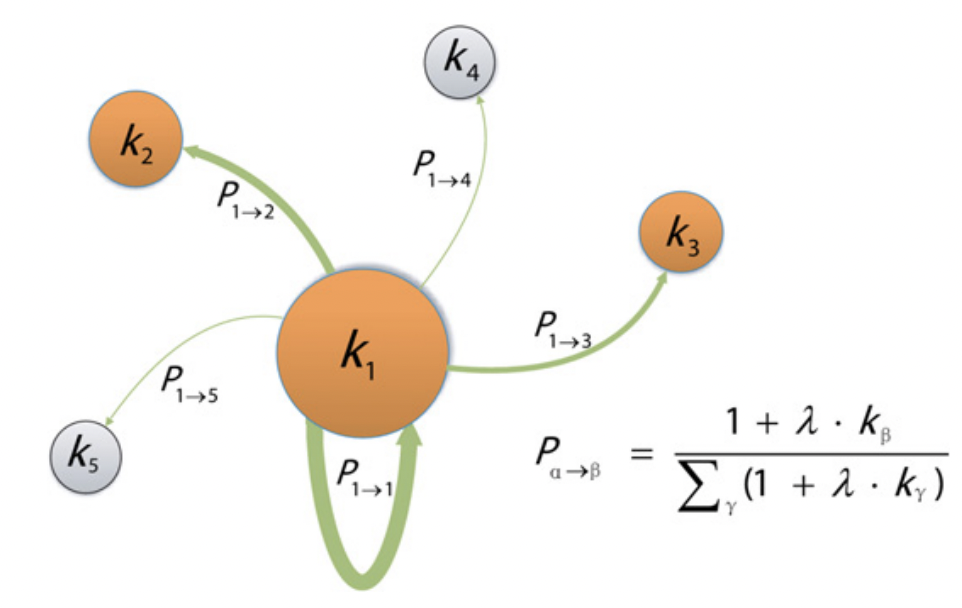 Unified underpinning of human mobility in the real world and cyberspace</a>
Unified underpinning of human mobility in the real world and cyberspace</a>
Yiming Zhao, An Zeng, Xiao-Yong Yan, Wen-Xu Wang, Ying-Cheng Lai.
New Journal of Physics. 2016.
[Paper]